
Abstract
This article presents the inverse dynamics algorithm to estimate external contact wrenches acting on a robotic manipulator from joint torque measurements. It presents the problem in the ideal case and details an analytic solution for a 2R robot. This is followed by an analysis in a realistic scenario by listing possible sources of uncertainty and showing how they affect the wrench estimate. The effect of such uncertainties is showcased on the 2R robot, first considering dynamic model uncertainties and later assuming noisy measurements. The paper is complemented by a GitLab repository that include some examples that visualize the solutions for the 2R robot cases presented in the paper, as well as including some additional cases in which the effect of other sources of uncertainties is investigated.
Keywords: Robotics, Force Control, Torque Sensors, F/T Sensors, Inverse Dynamics, Uncertainty Propagation.
Inverse Dynamics Solution
From manipulator dynamic formulation, a contact wrench acting on the end-effector can be computed from joint torque measurements using the inverse dynamics equation:

In practice, the cartesian contact wrench is computed using measured signals and approximate models:

This introduces some uncertainty in the estimate that is directly influenced by:
- Measurement Quality: noise, scaling, offsets, etc.
- Dynamic Model Uncertainty
- Unmodelled Effects (e.g., backslash, complex friction, flexibility, etc.)
- Numerical Conditioning of the manipulator Jacobian matrix, especially relevant near singularities where small errors are amplified.
Practical Example: 2R Manipulator
In order to illustrate the effect of the different sources of uncertainty in the inverse dynamics solution, we consider a planar 2R manipulator as shown in Figure 1. The manipulator has two revolute joints and two links.
The particular parameters of the manipulator used in the examples are:
| Link | Length (m) | Mass (kg) | CoM Distance (m) | Inertia (kg m²) |
| Link 1 | 0.60 | 2.00 | 0.30 | 0.00 |
| Link 2 | 0.50 | 1.50 | 0.25 | 0.00 |
For demonstration purposes, we consider the manipulator following some random trajectory that includes passing through a singularity. A constant external wrench of 10N in direction +X is applied at the end-effector.
In the following, we present some cases that show the effect of different sources of uncertainty in the inverse dynamics solution for this 2R manipulator. The examples are available in the GitLab repository linked above.
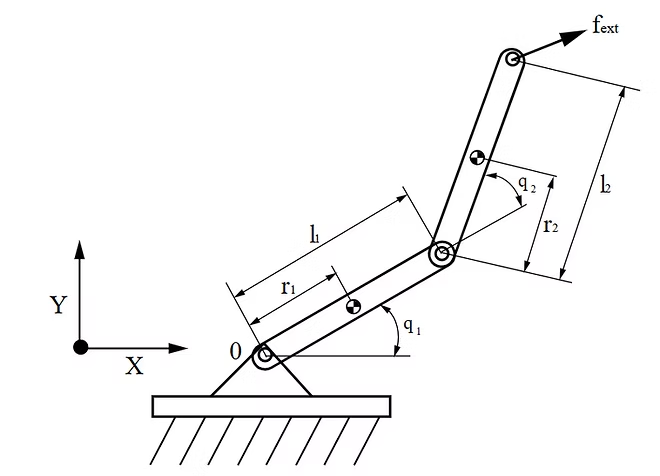
Case 1. Ideal Conditions
We first consider the ideal case where:
- The dynamic model is perfectly known.
- The measurements are exact.
- There is no friction.
We see how the reconstructed force matches perfectly the true applied force.
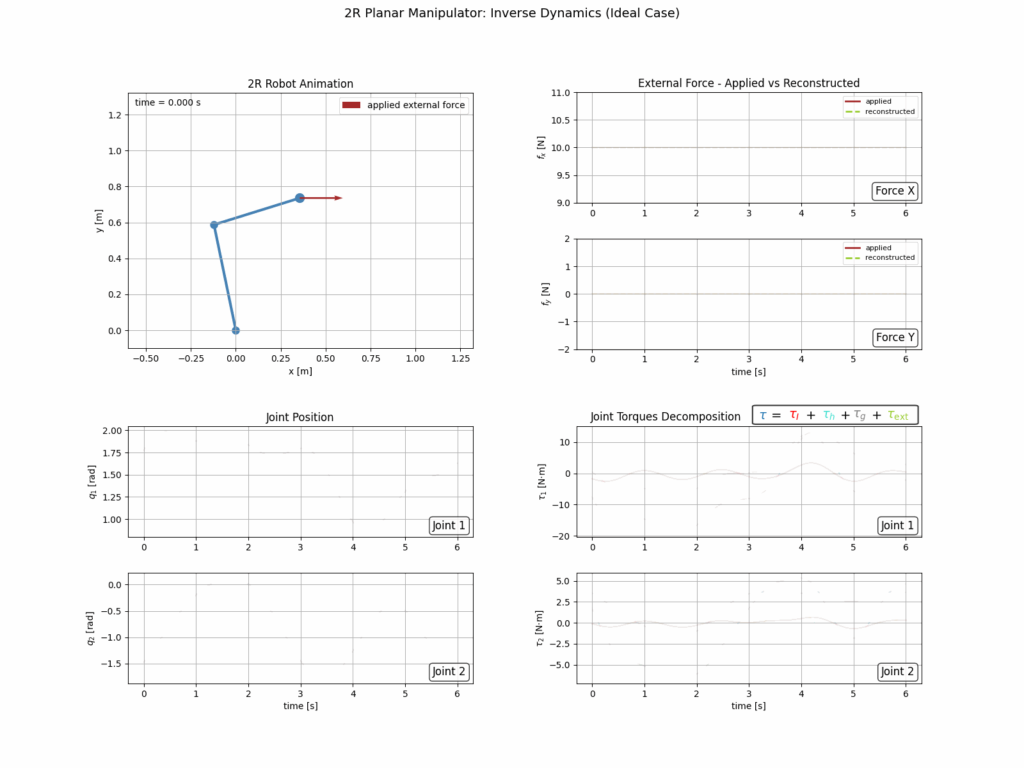
Case 2. Dynamic Model Uncertainty
Estimating the dynamic properties of the manipulator is always subject to errors, for this reason we investigate a the case where:
- Some dynamic model parameters are uncertain.
- The measurements are exact.
- There is no friction.
In particular we consider the parameters in the table below to compute the dynamic terms, note that these values differ from the true parameters presented above. In parenthesis we indicate the difference with respect to the true parameters.
| Link | Length (m) | Mass (kg) | CoM Distance (m) | Inertia (kg m²) |
| Link 1 | 0.60 | 2.05 <<(+0.05) | 0.32 <<(+0.02) | 0.00 |
| Link 2 | 0.50 | 1.575 <<(+0.075) | 0.26 <<(+0.01) | 0.00 |
We see how the reconstructued force now deviates from the true applied force due to the model uncertainty. The effect is particularly noticeable near the singularity, where small errors are amplified. In fact it is actually numerically impossible to reconstruct the force at the exact singularity as the Jacobian matrix is not invertible there.)
Case 3. Measurement Noise
In practice, measurements are always affected by noise, so we present next a case with the following premises:
- The dynamic model is perfectly known.
- The measurements are corrupted with zero-mean Gaussian noise.
- There is no friction.
In particular the standard deviation used for each measured signal is summarized in the table below:
| Signal | Std. Dev. | Units |
| Joint position (q) | 0.60 | rad |
| Joint velocity (q̇) | 0.011 | rad/s |
| Joint acceleration (q̈) | 0.60 | rad/s^2 |
| Joint torque (τ) | 0.050 | Nm |
We observe how the reconstructed force is affected by the measurement noise, especially near the singularity where small errors are amplified. We see that even with relatively small noise level, the uncertainty introduced in the force estimate is significant.

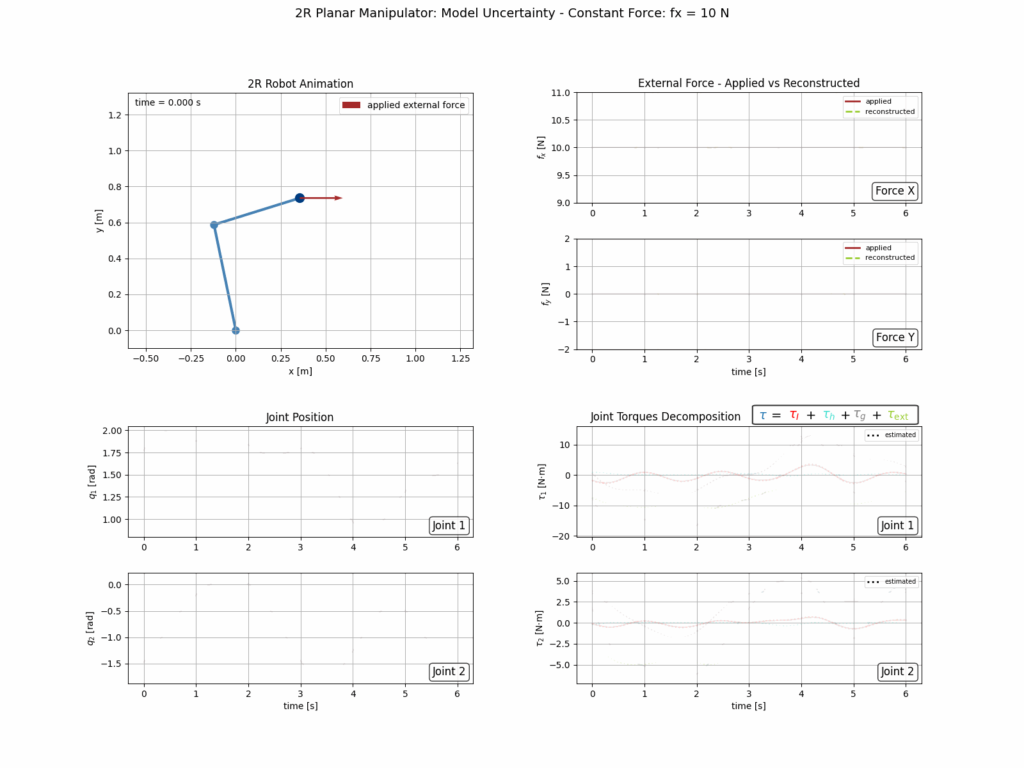
Case 4. Gain in Torque Measurement
Another common source of error in practice is a gain scaling in the torque measurements. Hence, we analyize the following case:
- The dynamic model is perfectly known.
- All measurements are exact, except the joint torque measurements, which have a gain error of +2%.
- There is no friction.
The figure below shows how the reconstructed force is affected by the gain error in the torque measurements, especially near the singularity. It is interesting to observe that a relatively small gain error in the torque measurements (see solid and dotted blue lines in the bottom right corner plots) translates into a significant error in the force estimate.
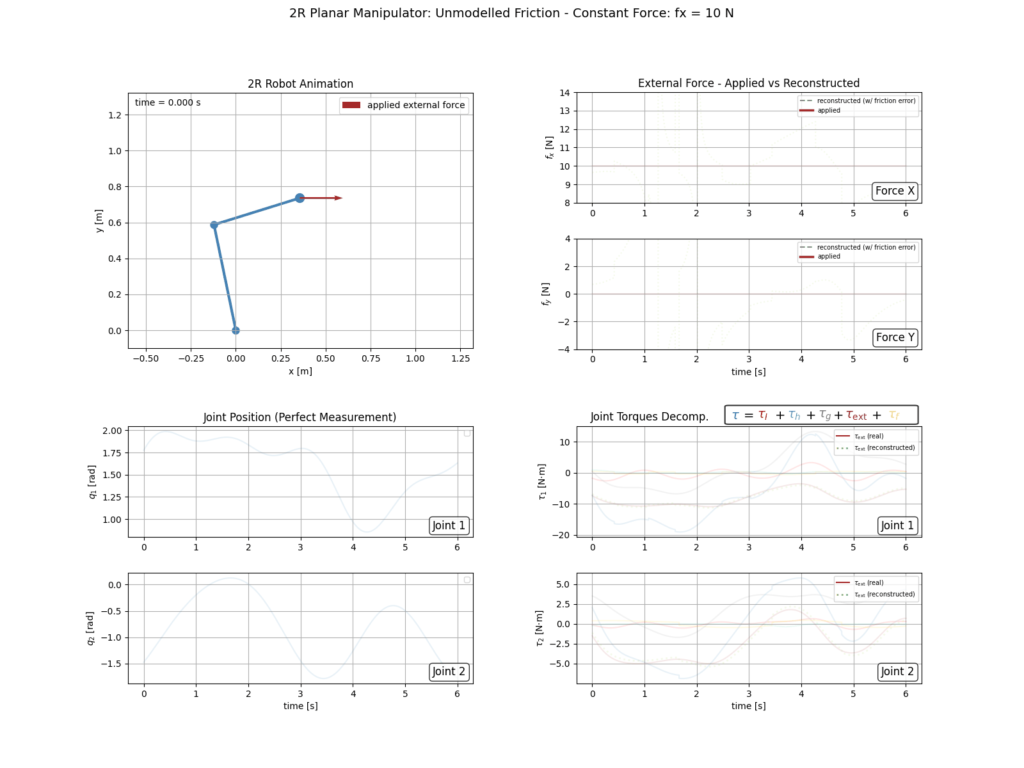
Case 5. Unmodelled Friction
In practice, friction is always present in the joints of a manipulator, and it is actually very difficult to model it accurately. Therefore, we present the following case:
- The dynamic model is perfectly known.
- The measurements are exact.
- There is unmodelled friction in the joints.
In particular, we consider the friction parameters in the table below to simulate the joint torques, while the inverse dynamics algorithm assumes no friction.
| Signal | Coulomb Friction (Nm) | Viscous Friction (Nms/rad) |
| Joint 1 | 0.3 | 0.2 |
| Joint 2 | 0.2 | 0.15 |
The figure below shows how the reconstructed force is highly affected by the unmodelled friction effects.
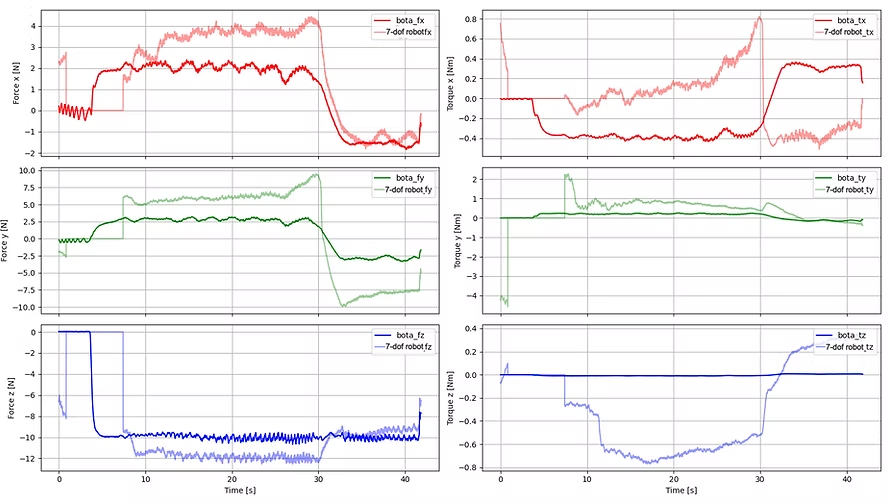
Real case: 7 Degrees of Freedom robot manipulator with torque sensing
In order to showcase the performance of the inverse dynamics algorithm to a real manipulator, we consider a 7-DoF robot, which includes torque sensors in all its joints. This 7-DoF robot offers out-of-the-box a pretty advanced inverse dynamics algorithm to estimate the external contact wrench acting on the end-effector from joint torque measurements.
We compare the estimated wrench from the 7-DoF robot with a Bota Systems SensONE F/T sensor mounted directly at the end-effector. Both signals are expressed in the same frame to allow for comparison.
The figure below shows the results when the manipulator is following a straight line in the XY plane while aiming to track 10N in -Z direction. The trajectory starts 10cm from the robot base and moves to 70cm away.
We can see that the estimate from the 7-DoF robot outputs zero in the beginning, being this a safety feature from 7-DoF robot algorithm. The reason behind this is that the robot is in a configuration in which the Jacobian matrix is ill-conditioned and the noise in the torque measurements is amplified significantly, leading to an unstable estimate.
After this initial phase, although there are some deviations that can be attributed to the different sources of uncertainty discussed above, we can see how the estimate roughly tracks the force measurement from the F/T sensor. For joint torques, the reconstruction deteriorates more because the true torque values are relatively small — the same absolute uncertainty therefore produces a much larger relative error.
Conclusion
In summary, while contact wrench reconstruction from joint torques is theoretically exact under ideal conditions, its practical accuracy is limited by modeling errors, sensor noise, unmodeled effects, and poor conditioning near kinematic singularities, making the estimate strongly configuration-dependent. End-effector force/torque sensors therefore, remain the most reliable solution for accurate tool-wrench feedback, whereas joint torque sensing is better suited for full-body contact awareness and disturbance detection. A complementary use of both approaches provides the most robust solution in real-world applications.



