Leveraging force sensing to empower the AI community with the next generation of robotic data collection methods.
Bota Systems’ TACTO enables Physical AI by combining high-fidelity force sensing, tactile feedback, vision, and robot state into a unified data collection platform from the real world.
The system is designed to help researchers and automation teams generate reliable, contact-rich datasets for modern robotic learning.
Enhance physical interaction data with visual context:
POV 3D cameras
Cameras on the wrist
Synchronized multimodal recording
Natural Language
Add semantic context to every episode:
Text or audio stored in SQL database
Structured annotations for training pipelines
High-Quality Data for Manipulation
Bimanual operation enables demonstration for wide variety of tasks straight on the robot
Precision assembly on-the-fly
Handover without
Versatile object manipulation
Designed to produce clean, learning-ready datasets for contact-rich robotic tasks.
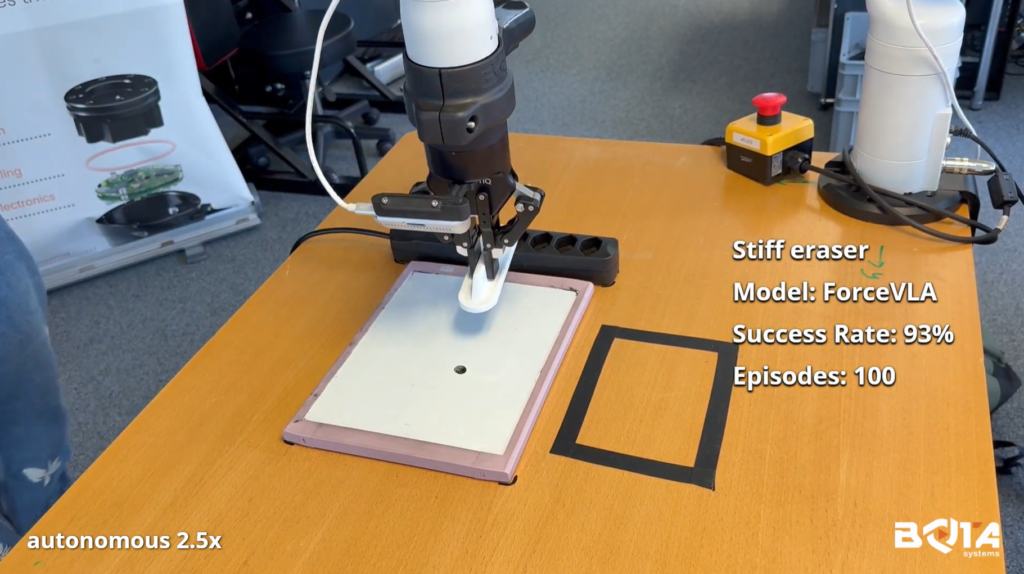
Extreme Sensitivity with the Sense of Touch
Measure subtle interactions with high resolution:
Wrench at TCP precision < 0.1 N
Fingertip tactile sensitivity < 0.01 N
Detect micro-forces, early contact events, and slip — beyond what vision alone can provide.
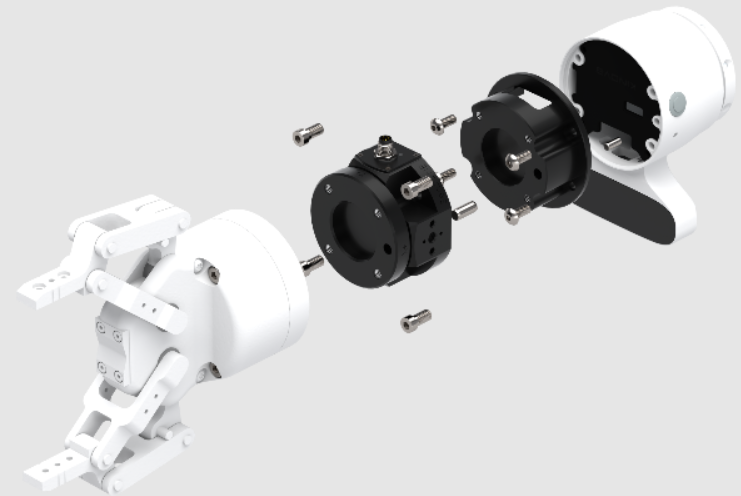
Precision You Can Trust
Reliable Hardware
Bota unique force sensing technology enables any method to achieve maximum efficiency and accuracy for data collection with the most reliable hardware:
The Bota Systems data collection platform integrates seamlessly with a wide range of robot brands and accessories, combining hardware compatibility with deep, low-level software integration.
With access over a web browser you can configure your demonstration method, your hardware from more than 15 popular robot brands and grippers available and Controllers for testing and deployment of the learned policy
Access through browser
Communicate through Ethernet
Lean design
Live measurements
Designed for smooth user experience
Ready to Build Physical AI?
Robots will be programmed by AI in the next years. You can start today