Six-axis force-torque sensors are exceptionally sensitive, capable of detecting even the smallest changes in applied forces and torques. However, in real-world robotic systems, signal noise is inevitable. Interference can corrupt the sensor signal, leading to compromised data integrity and reduced system performance.
For applications that rely on precision—such as robotic-assisted surgery—sensor noise is unacceptable. A noisy signal in a closed-loop robotic system can lead to instability.
When high-frequency noise is interpreted as valid input, fast controllers may react aggressively, risking damage to the robot, tooling, or its surroundings.
Here, we will take a closer look at what causes noise, noise sources, and how to reduce noise from corrupting a force-torque sensor’s readings and robotic system.
What Causes Sensor Noise?

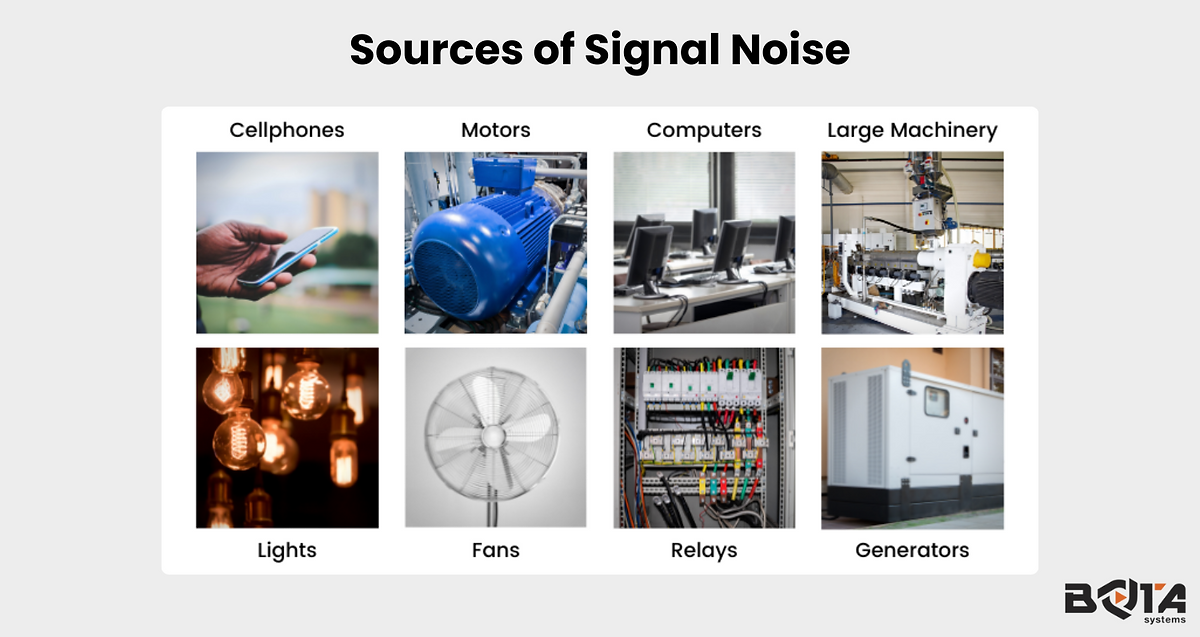
The most common cause of signal distortion in force-torque sensors is Electromagnetic Interference (EMI). This interference is typically introduced by surrounding devices and systems such as:
Electric motors
Power supplies
Computers and communication equipment
Lighting systems
Relays and large machinery
Fans and generators
Mobile devices
These noise sources can disrupt the sensor signal, making it harder to extract meaningful data and increasing the risk of instability in feedback-driven applications.
How to Reduce Signal Noise
Effective signal noise reduction involves a combination of hardware design and software filtering. Below are key strategies to improve signal integrity in force-torque sensors:
1. Optimized Cabling
Using high-quality, EMI-shielded instrumentation cables is one of the most effective preventive measures against electrical noise. These cables often incorporate:
Foil or braided shielding
Durable and flexible materials for harsh environments
Appropriate shielding for the signal type and environment
Cable length also plays a role. Longer cables can act like antennas and attract more EMI. Minimizing cable length helps reduce sensor noise by limiting exposure.
Additionally, cable routing is critical.
Avoid running sensitive sensor cables alongside high-EMI lines, such as motor power cables. Where possible, maintain physical separation and use grounded shielding between them.
2. Proper Grounding
Grounding is essential for signal noise reduction. A well-designed grounding scheme ensures that EMI is safely redirected away from the sensor’s signal path.
Poor grounding can create ground loops or allow transients that introduce electrical noise into the system.
3. Analog Filters
Incorporating analog low-pass and anti-aliasing filters near the sensor’s ADC input removes high-frequency noise before the signal is digitized.
These filters play a crucial role in hardware-based noise suppression.
4. Oversampling and Digital Filtering
While complete elimination of noise through hardware is unlikely, digital filtering can further clean up the sensor signal. Oversampling combined with low-pass software filters helps simulate a clean, high-resolution signal.
At Bota Systems, our sensors include user-adjustable digital filters, easily accessible via our software interface, for custom filtering based on your application needs.
How Bota Systems Reduces Sensor Noise
Bota Systems force-torque sensors are shielded against noise sources and follow the immunity standards for industrial environments (IEC 61000-6-2:2016), emission standards for residential, commercial, and light-industrial environments (IEC 61000-6-3:2006 + A1:2010), and our sensors are also immune to BURST and ESD.
The sensor’s housing acts as a Faraday Cage for the embedded electronics, and the voltage signal is designed to be differential and ratio-metric.
This way, the common-mode signal is rejected with a high common-mode rejection ratio (CMMR). Then the signal goes through the analog antialiasing and low pass filters, which are located just before the ADC input, and are used to reject the remaining high-frequency components of the signal that add noise.
In addition to reducing noise through the hardware of the sensor, we provide easily adjustable digital filtering that is accessible through our software interface.
If you have any questions about reducing sensor noise or noise within a specific application, we recommend talking with one of our experienced engineers to discover the best solution.