
Understanding analog and digital inputs is fundamental for engineers, system integrators, and decision-makers building reliable, high-performance robotic systems. At the core of modern robotics and industrial automation lies a simple question: how do machines interpret the real world?
From a robotic arm delicately gripping an object to a conveyor system detecting product presence, every action begins with input signals. These signals translate physical conditions–such as position, force, temperature, or presence – into data a machine can process.
Not all inputs, however, are created equal.
This article explains what analog and digital inputs are, how they differ, and why both play a critical role in robotics.
Analog vs Digital Input: Quick Explanation
Analog inputs measure continuous real-world values such as temperature, force, or pressure, enabling precise control and feedback.
Digital inputs in robotics can refer to two distinct types of signals:
- Binary (discrete) signals used for ON/OFF detection (e.g., switches, safety signals)
- Digitized measurement data transmitted from sensors that perform internal signal conversion
The key distinction in modern robotic systems is often where the signal is digitized – either inside the controller (analog input) or inside the sensor (digital interface).
What is an Analog Input?
An analog input is a signal that varies continuously over time and can take any value within a given range.
If you’re wondering what is an analog input, think of it as a direct representation of real-world physical quantities such as:
- Temperature
- Pressure
- Force
- Light intensity
These physical variables are inherently continuous, and analog signals preserve that continuity.
Unlike discrete signals, it can assume infinitely many values within a range and is acquired by controllers through an external Analog-to-Digital Converter (ADC), whose resolution (e.g., 12-bit, 16-bit) determines measurement precision.
Key technical considerations include signal conditioning (amplification, filtering), noise susceptibility, sampling rate (Nyquist criterion), and quantization error, all of which affect accuracy and reliability in control and measurement systems.
Key Characteristics
- Continuous signal
- Infinite possible values within a range
- Represents real-world phenomena directly
- Requires conversion for digital processing
Analog Input Examples
Some common analog input examples and analog input devices used in robotics include:
- Force/torque sensors in robotic grippers
- Temperature sensors in industrial systems
- Pressure sensors in hydraulic systems
- Potentiometers for position control
- Load cells for weight measurement
In robotics, analog inputs are essential for precision control and feedback systems.
What is a Digital Input?
In robotics and industrial automation, a digital input refers to a signal that reaches the controller in a digital (discrete) form. This can occur in two ways depending on system architecture.
1. Binary Digital Inputs (Discrete Signals)
These represent simple ON/OFF states and are widely used in control and safety systems:
- Limit switches
- Proximity sensors
- Emergency stop circuits
They are read directly by the controller and used for fast, deterministic decision-making.
2. Digitized Sensor Data (Communication-Based Inputs)
In modern robotic systems, many sensors integrate an Analog-to-Digital Converter (ADC) internally and transmit measurement data digitally via communication protocols such as SPI, I2C, CAN, or industrial Ethernet.
In this case:
- The physical quantity (force, position, temperature) is still continuous
- The signal is digitized at the sensor level
- The controller receives processed data rather than raw electrical signals
Key Distinction
The fundamental difference between analog and digital inputs in robotics is not the type of physical phenomenon being measured, but where signal digitization occurs:
- Analog input → digitization happens in the controller
- Digital input → digitization happens in the sensor
Key Characteristics
Binary Digital Inputs:
- Discrete signal (0 or 1)
- Used for state detection and safety
- Fast and deterministic
Digitized Sensor Inputs:
- Digitized representation of continuous data
- Transmitted via communication protocols
- Less susceptible to noise during transmission
- No external ADC required
Digital Input Examples
Common digital inputs in robotics and automation include:
Binary (Discrete) Inputs:
- Limit switches (end-of-travel detection)
- Proximity sensors (object detection)
- Push buttons (manual control)
- Safety signals (e.g., emergency stop circuits)
Digitized Sensor Inputs (Communication-Based):
- Force/torque sensors with digital output (EtherCAT, CAN)
- Smart encoders with digital communication interfaces
- IMUs providing digital motion data
- Vision systems transmitting processed data
Analog Input vs Digital Input (Core Differences)
Understanding digital input vs analog input comes down to how signals behave and how they are used. The figure summarizes the core differences based on various features:
| Feature | Analog Input | Digital Input |
| Signal form | Raw continuous signal | Digitized signal or binary state |
| Source | Sensor outputs voltage/current | Sensor outputs binary signal or processed data |
| ADC location | In controller | In sensor (for measurement data) |
| Data type | Continuous signal (pre-digitization) | Discrete representation (binary states or quantized data) |
| Noise sensitivity | Higher (especially over distance) | Lower (robust transmission, protocol-based) |
| Integration | Requires signal conditioning and ADC | Direct input or communication-based integration |
If you’re still wondering about the difference between analog and digital inputs, it comes down to how information is represented and processed within the system.
Analog inputs use continuous signals that change proportionally with real-world quantities, such as voltage reflecting force or temperature. This enables high-resolution measurement but requires ADC conversion, signal conditioning, and careful noise management.
In industrial and robotic systems, the term “digital input” can refer to both binary signals (used for logic and safety) and digitized measurement data (used for sensing and feedback). In both cases, the signal arrives in a discrete form.
The key difference is not the physical quantity being measured, but where signal conversion happens: analog inputs are digitized in the controller, while digital inputs are digitized in the sensor or already represent discrete states.
Analog to Digital Converter (ADC)
An Analog-to-Digital Converter (ADC) is a critical interface that transforms continuous analog signals (e.g., sensor voltages or currents) into discrete digital values that a controller can process.
It operates by sampling the input signal at a defined rate, quantizing it into finite levels based on its resolution (e.g., 12-bit = 4096 levels), and encoding it into binary form.
Key technical parameters include sampling rate (must satisfy Nyquist criterion to avoid aliasing), resolution (determines measurement precision), and quantization error.
Practical implementations also require signal conditioning (filtering, scaling, isolation) to ensure accurate conversion, making ADC performance crucial for maintaining fidelity in feedback and control systems.
Noise, Accuracy, and Reliability
Analog Inputs
- Susceptible to electromagnetic interference (EMI), ground loops, and signal attenuation, especially over long cable runs
- Accuracy depends on ADC resolution, reference stability, and quality of signal conditioning (filtering, amplification)
- Vulnerable to quantization noise, thermal drift, and offset errors
- Requires shielding, proper grounding, and careful PCB/layout design to maintain signal integrity
- Performance degrades with poor wiring or harsh industrial environments
Digital Inputs
- Strong immunity to noise due to discrete encoding and error-resistant communication protocols
- Signal integrity maintained over longer distances using differential signaling (e.g., CAN, RS-485, EtherCAT)
- Accuracy primarily determined by sensor’s internal ADC and calibration, not transmission path
- Less affected by external interference once digitized
- Reliability depends on protocol robustness (error detection, synchronization, packet integrity)
Engineering Trade-off
- Analog: higher exposure to transmission noise but full control over acquisition chain
- Digital: lower transmission noise and higher robustness, but dependent on sensor-side conversion quality
Real Industrial Use Cases
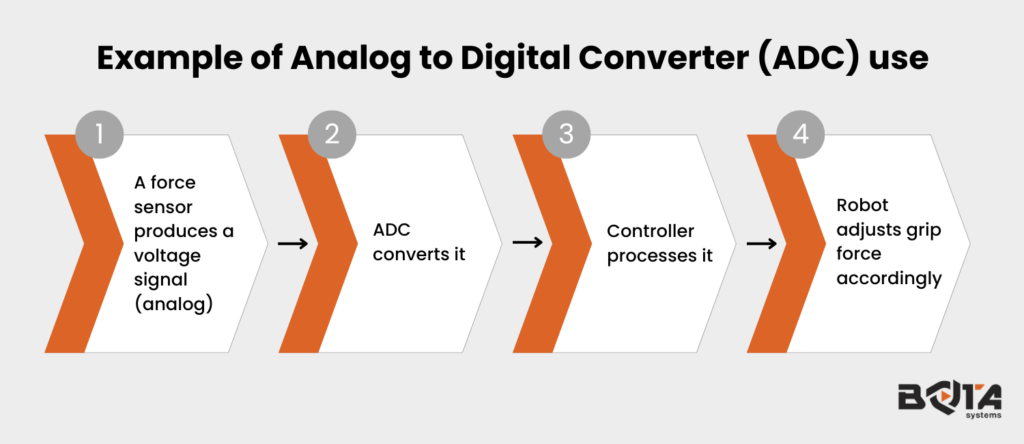
Robotic Gripper (Precision Task)
In precision manipulation applications such as robotic grippers, a force or torque sensor produces a proportional electrical signal corresponding to the applied gripping force.
Analog-output sensors provide raw voltage/current signals proportional to applied force
- These signals are digitized in the controller and used in high-frequency closed-loop control
- Enables fine tuning of grip force and dynamic adjustment during contact
Alternatively:
- Digital force/torque sensors perform onboard ADC and transmit calibrated force data via protocols (e.g., EtherCAT)
- Reduces noise and simplifies integration in multi-axis control systems
Conveyor Belt System

In conveyor-based automation systems, digital inputs are primarily used for discrete object detection. Sensors such as inductive or photoelectric proximity switches generate binary signals indicating object presence or absence.
These HIGH/LOW signals are directly read by the controller without the need for signal conversion, enabling rapid decision-making for operations such as sorting, counting, or stopping the belt.
Since the requirement is state detection rather than measurement, digital inputs provide a robust, noise-tolerant, and computationally efficient solution for high-speed industrial environments.
High-Speed Motion Feedback (Encoders and IMUs)
Robotic motion control requires continuous feedback of position, velocity, and orientation.
- Analog encoders (e.g., sine/cosine outputs) provide high-resolution raw signals requiring controller-side interpolation and ADC
- Digital encoders transmit processed position data directly, ensuring synchronization and noise immunity
- IMUs typically provide digitized multi-axis acceleration and angular velocity data over serial interfaces
This enables accurate trajectory tracking and real-time state estimation in robotic systems.
Distributed Robotic Systems (Networked Sensors)
Modern robotic architectures use distributed sensing across multiple nodes.
- Digital sensors communicate via fieldbus or industrial Ethernet (CAN, EtherCAT, etc.)
- Each sensor performs local signal acquisition and digitization
- Reduces wiring complexity and allows scalable system design
This is critical in collaborative robots and modular automation systems where multiple sensors operate simultaneously.
Safety-Critical Control Systems
Safety layers in robotics require deterministic and fail-safe signal handling.
- Digital inputs from safety-rated devices (e.g., emergency stop circuits, safety PLCs, limit switches) provide discrete, validated states
- Used for immediate interruption of motion or system shutdown
- Designed with redundancy and fault detection mechanisms
These signals operate independently of high-level control to ensure compliance with safety standards.
Process Monitoring and Environment Sensing
Robots operating in industrial environments require continuous monitoring of process variables.
- Analog sensors (temperature, pressure, current) provide raw signals for controller-side processing
- Digital sensors provide pre-calibrated, noise-resistant data for supervisory control
Used in applications such as:
- Thermal monitoring in welding robots
- Pressure control in hydraulic actuation systems
- Energy monitoring in robotic cells
System-Level Insight
In practice, both input types coexist:
- Analog paths are used where tight control over signal acquisition is required
- Digital interfaces dominate where robust communication, scalability, and integration are priorities
The choice is driven by control bandwidth, system architecture, and environmental constraints—not by the type of physical quantity being measured.
How Advanced Robotics Leverage Analog & Digital Inputs
At the forefront of robotics innovation, high-performance systems rely on accurate sensing and robust decision-making.
For example:
- Force-torque sensors provide high-resolution analog signals for precision tasks
- Digital safety systems ensure compliance with industrial safety standards
- Hybrid architectures combine both for optimal performance
Companies like Bota Systems specialize in enabling advanced robotic capabilities through high-fidelity sensing technologies, especially in applications requiring precise force control and interaction awareness.
Conclusion
Analog and digital inputs in robotics do not differ in the physical phenomena they represent, but in how measurement data is acquired and delivered to the control system.
Analog inputs provide direct access to raw sensor signals, offering flexibility in signal processing and tight integration with control algorithms. Digital inputs, in contrast, deliver pre-digitized data from sensors, enabling robust communication, simplified integration, and scalable system architectures.
In modern robotic systems, the design choice is primarily architectural—determining where signal conversion occurs and how data flows through the system. High-performance applications typically combine both approaches to balance control fidelity, noise resilience, and system complexity.
A clear understanding of this distinction is essential for designing reliable, high-precision robotic systems.



