
An important aspect of using a Force Torque Sensor and obtaining high-quality signals is properly attaching the sensor to the robot and the tool.
This guide explains why and how.
Mechanical Mounting
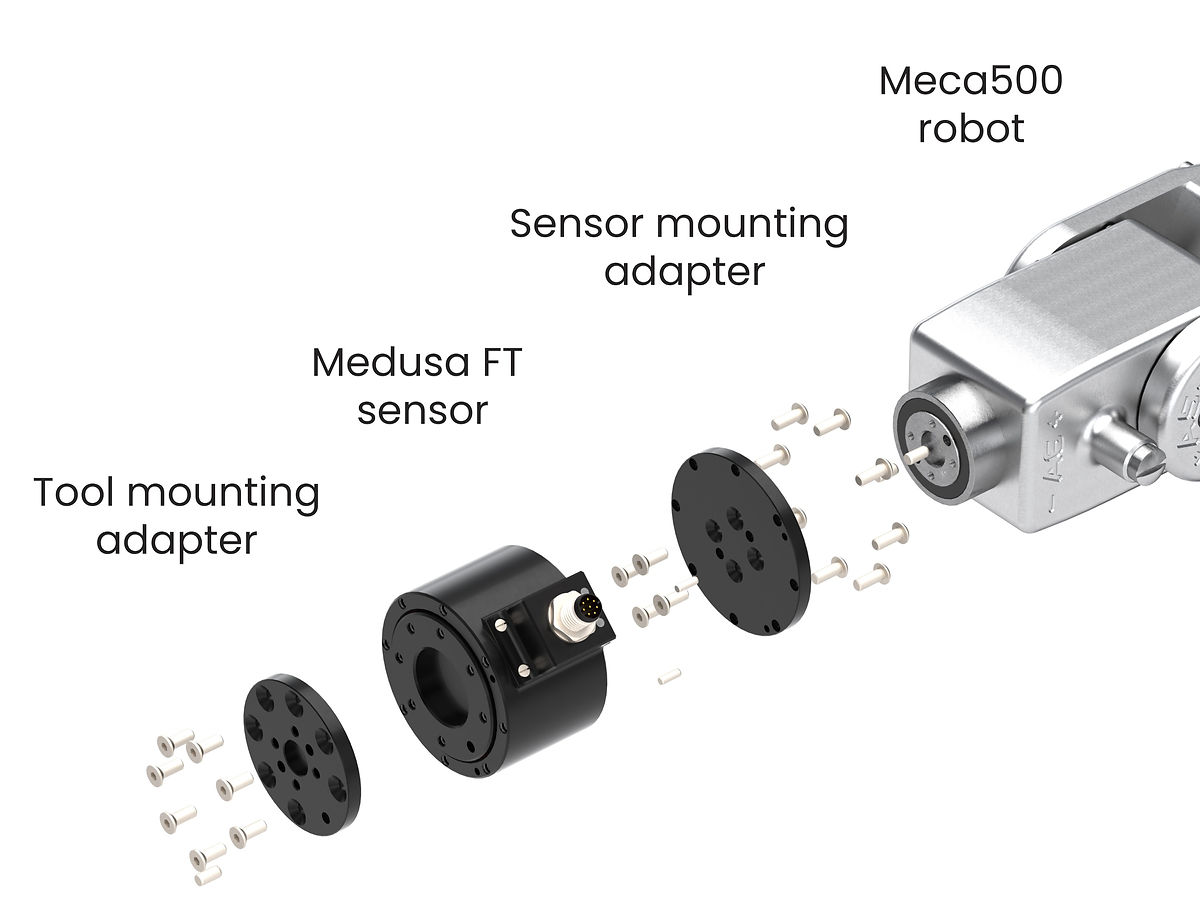
There are several components that are involved in the mounting of a 6-axis Force Torque sensor. A sensor consists of a mounting side and a load side where the application force is induced.
A standard mechanical attachment is composed of the following components. First, there is the mounting part, usually the robot flange, where a custom mounting adapter is secured with fasteners followed by the sensor mounted on the adapter.
In most cases, a second adapter is required that bolts on the sensor measuring flange in order for different tools to attach to it.
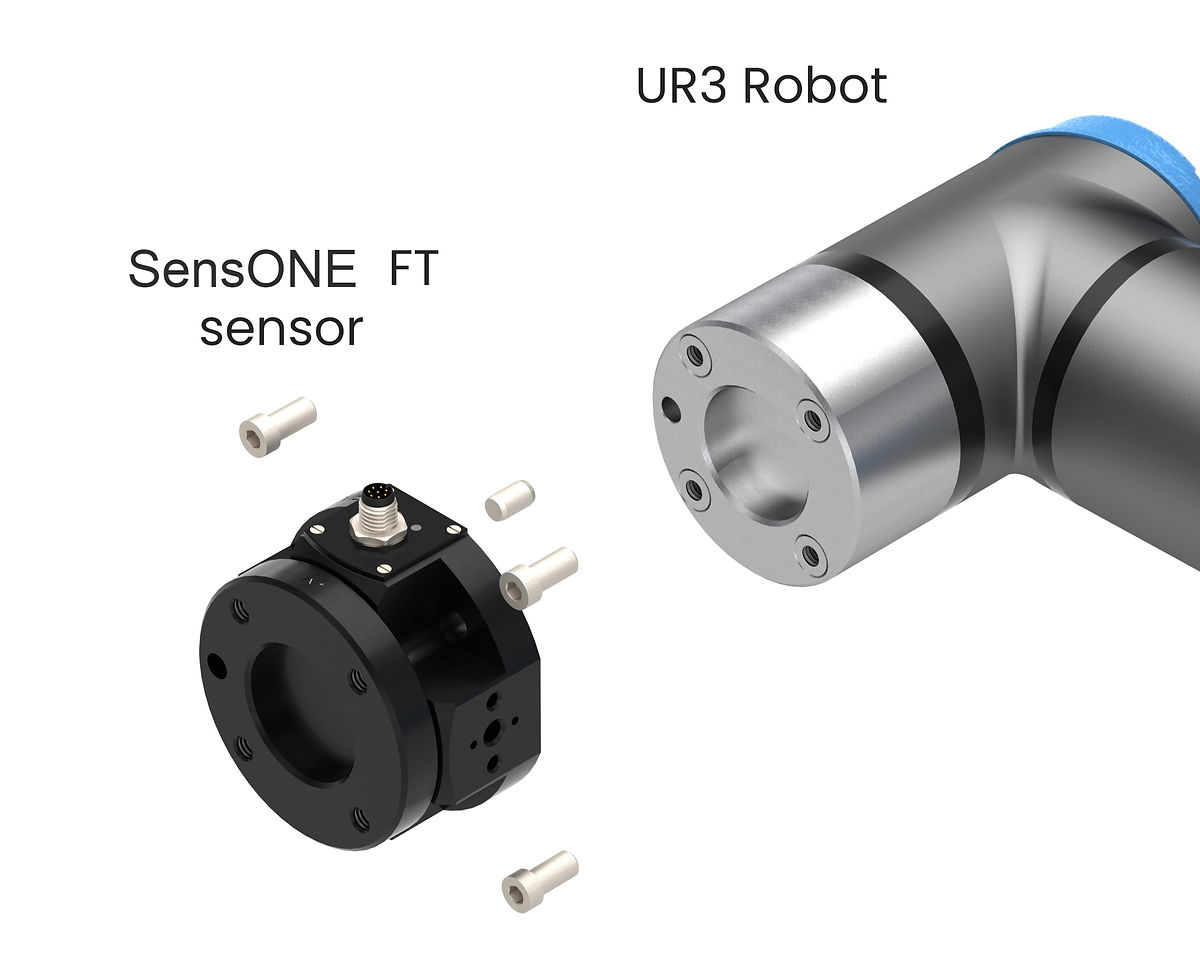
Our products LaxONE and MiniONE feature standardized tool flanges eliminating the need for a tool adapter, whereas SensONE even eliminates the need for both adapters as it comes with an ISO 9409-1-50-4-M6 flange. Mounting SensONE is as easy as screwing 4 bolts.
Designing Custom Adapters
A 6-axis Force Torque sensor is fundamentally a very stiff spring element with two high rigidity flanges equipped with electronics that are able to measure this spring’s displacement and hence calculate the applied wrench (force and torque combination).
This concept assumes that for a given wrench, only the spring element is deformed and the remaining bodies are considered rigid.
High-quality Force Torque sensors are designed with a high rigidity ratio between their mounting flanges and the spring element to ensure maximum measurement quality.
To design custom mounting adapters one has to consider that the rigidity of the flanges is not indefinite. Therefore, one has to make sure that all the components directly or indirectly attached to the sensor have at least higher stiffness than the sensor’s built-in mounting flanges.
The material chosen for the adapter should be homogenous and preferably isotropic. For this purpose, it is recommended to use mild steel or aluminum.
We do not recommend using 3D-printed plastic adapters for mounting sensors because they can be flexible and anisotropic.
In case the sensor is used with a robotic manipulator or mounted on a moving machine the mass mounted on the sensor will act as a spring-mass system that oscillates.
The mass value and the distance to the centroid of the load define the system’s resonant frequency, with the distance being inversely proportional to frequency. Hence, it is recommended to keep the tool side adapter as short as possible, hence maximizing the resonance frequency.
Sensor manufacturers should provide the sensor stiffness matrix that can be used to calculate the expected resonant frequency.
To help our customers minimize the time-to-market or accelerate their experiments, at Bota Systems we offer with each of our sensors mounting kits for a range of industrial and research robots.
Choosing the Right Fasteners
Special care has to be taken about the type of fasteners being used. Fasteners that don’t allow for position tolerances (countersunk or flat shoulder screws) should not be used as they can induce non-linear behavior and measurement offset.
The accurate alignment of the adapter with the sensor or the mounting part should be achieved using alignment pins. Finally, the fasteners clamping force has to ensure no relative movement between the fastened parts is occurring, as otherwise hysteresis effects can arise.
We recommend always using a torque wrench for fastening to ensure uniform and correct tightening torque across all screws.
Cable Mounting
To achieve an undisturbed signal quality and longevity of the sensor, we recommend taking care of proper cable fixing.
Excess loading on the cable connector can also cause parasitic measurements. We recommend mounting the cable in a way that minimizes torques applied on the cable connector and prohibits relative movement with respect to the sensor.
Specifically, in case the sensor is mounted on a robotic manipulator special care has to be taken that there is enough cable slack to accommodate the movement of the joint. We recommend making one spiral around each rotational robot joint and using energy chains for linear joints.



To accommodate your applications, our sensor feature mounting positions to be used for mounting accessories like cable clamps, camera mounts (RealsenseD435), or your own designs. All our accessories come with 3D models and URDF files.


Heat management
Heat dissipation should be considered during the design of the adapters. Force Torque sensors are sensitive to temperature differences.
In case the mounting of the sensor experiences changing temperature (e.g. high performing motors or welding tools) the designer should try to thermally insulate the sensor from the heat source.
Most advanced sensors feature temperature compensation, but unfortunately, this compensation cannot predict the thermal behavior of the adapters and the remaining mechanical installation.
Bota Systems’ sensors provide temperature measurements such that the user can calibrate the whole system and also offers a temperature compensation algorithm that can be adjusted to fit the system.
Electrical Integration
Force Torque sensor operation is relying on measuring very small displacement in the sensing element with the help of strain gauges that convert it to voltage.
The expected voltage range of such a measurement is in the range of millivolts and makes it necessary for these devices to be electrically and magnetically isolated from noisy environments.
To achieve such high immunity against electrical noise, sensor manufacturers often connect the sensor’s housing electrically to the negative voltage supply.
We recommend supplying the sensor through an isolated power supply to avoid voltage transients and ground loops.
In case the sensor is supplied by a shared power supply, the system designer has to check if the mounting of the sensor has the same voltage level. Otherwise, parasitic currents will flow through the sensor electronics leading to damage.
Fast and Reliable Sensor Integration with Bota Systems
Bota Systems’ goal is to provide high-quality Force Torque sensors with the minimum integration time, for this reason, some of our products feature standardized mounting flanges to be mounted directly on robots without the need for a mechanical adapter. Furthermore, we provide mounting kits for a range of known robot models.
Together with our advanced software and wide range of accessories our clients can start implementing force applications in a single day.
In the downloads section, user manuals and mechanical drawings of the mounting patterns for each one of the models can be found.


If you have any questions about how to mount a sensor or design an adapter, we recommend talking with one of our experienced engineers to discover the best solution.



