6-axis force torque sensors are gaining more and more popularity in robotic applications – a clear trend is evident.
The key drivers include the growing, ubiquitous use of robots in increasingly unstructured environments, where they are required to perform more complex and demanding tasks, whilst working in cooperation with human collaborators.
When it comes to robotic manipulators for industrial applications, the vendors frequently offer a built-in force torque sensor that is integrated into their robot as a standard part or offered as an optional extra.
While this may be more than adequate for common applications such as pick-and-place tasks, a separate external force torque sensor offers superior precision and flexibility for more demanding and sophisticated use cases.
Integrated sensors form a fundamental part of every modern robot, which necessitates that their cost is noticeably lower than special external sensors, which in turn tends to result in their lower performance.
Thus, since integrated sensors are not as precise as external sensors, they require additional filtering and software algorithms to achieve the required accuracy, which then naturally leads to undesirable latency.
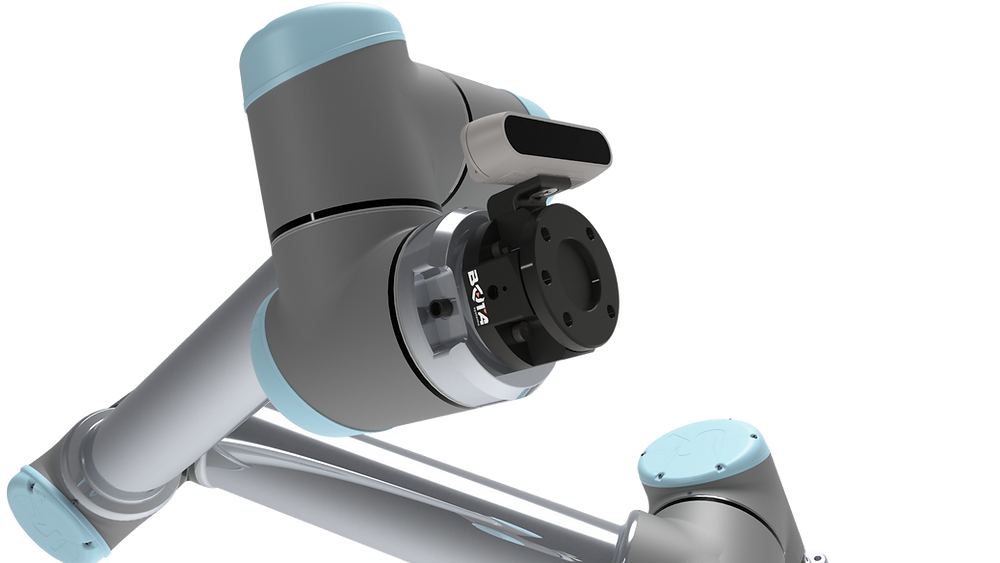
A typical, straightforward robot-tooling interface configuration utilizing a force torque sensor is shown in Figure 1. The sensor is electrically connected through a cable to the robot’s controller.

In this article, we’ll dive into these issues in greater detail, examining the benefits that external force torque sensors deliver compared to common integrated options as of today.
A comparison of integrated and external sensing methods
Built-in 6-axis force torque sensor
For evaluation purposes, a Bota Systems force torque sensor was installed on a 20kg payload robot and compared against the robot’s integrated force torque sensor.
It is understood that this is a basic test on a specific robot, however, it is a typical representative application that, based on the company’s long-term experience, should provide objective comparative results.
The Bota sensor outperforms the built-in sensor across many criteria (see Table 1), where precision, noise, and accuracy are all substantially better. The maximum data sampling rate is also four times higher, at 2 kHz compared to 0.5 kHz.
| Bota Systems | Built-in | |
|---|---|---|
| Range (Fx, Fy, Fz) | +/- 2000, 4000 N | +/- 200, 200 N |
| Range (Mx, My, Mz) | +/- 70, 70 Nm | +/- 20, 20 Nm |
| Noise 1σ at 100Hz (Fx, Fy, Fz) | 70 mN, 50 mN | 200 mN, 200 mN |
| Noise 1σ at 100Hz (Mx, My, Mz) | 2 mNm, 0.7 mNm | 10 mNm, 6 mNm |
| Precision | < 1% | 2.75% |
| Accuracy | < 1% | 5% |
| Data Sample Rate | Up to 2 kHz | Up to 0.5 kHz |
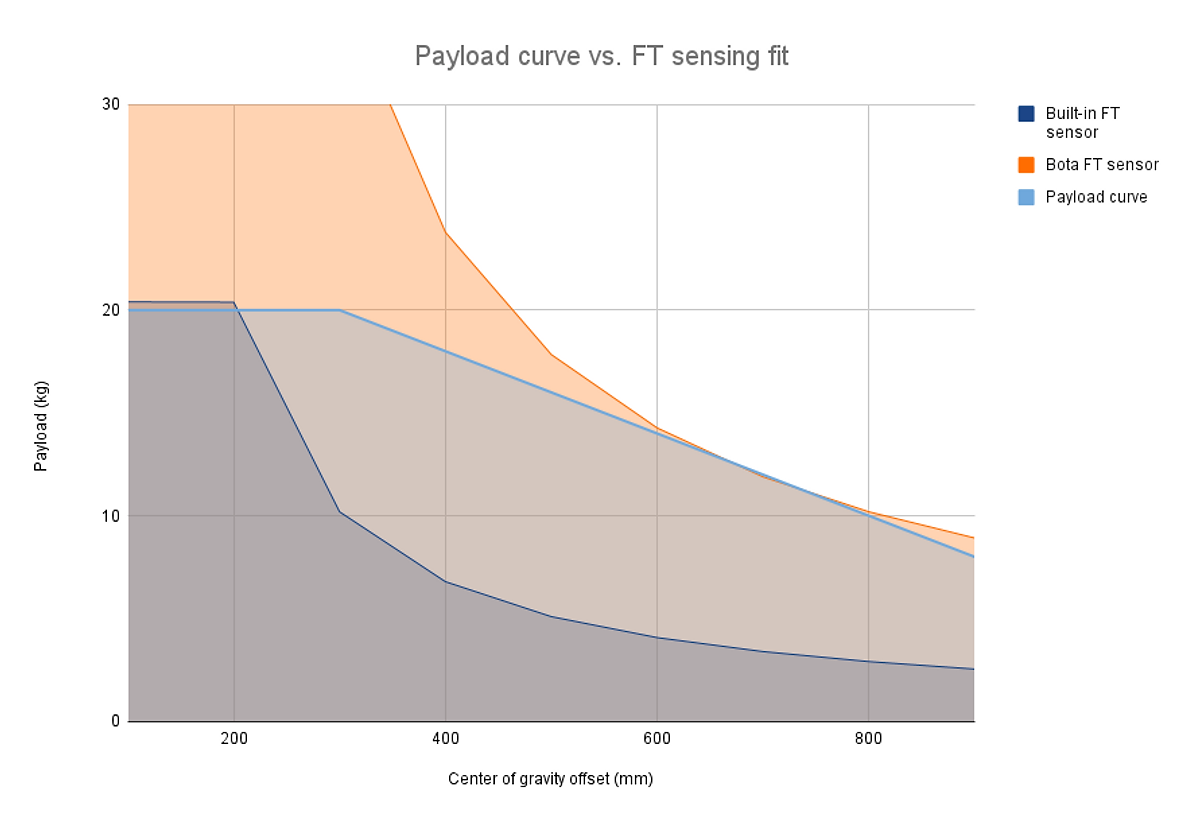
Figure 2 clearly shows that the Bota Systems FT sensor payload capacity fits the payload curve of the 20 kg robot, whilst the integrated/built-in sensor does not appear to be covering the robot’s entire area of operation.
For example, a load of 100 N applied at a distance of 600 mm perpendicular from the reference frame of the tool flange induces a load of 60 Nm that is located outside of the operating range of the built-in sensor.
In this blog, a guide to selecting force torque sensors is shown to avoid use cases of selecting a force torque sensor that doesn’t fit in an application.
The weak specifications of the internal sensor prevent the robot from performing force-sensitive tasks across its entire operating range, effectively limiting its payload and range capabilities in important applications such as surface finishing or assembly.
Robot joint torque sensor
An alternative approach to calculating the 6-axis force vector at the robots’ end-effector is by measuring the torque at the output shafts of the joints by using torque sensors (see Figure 3).
Torque sensors are installed on each one of the joints. The measured torque at each joint, combined with the joint’s position measurement and robot kinematics, is theoretically sufficient for calculating and estimating the force vector at the end effector.

At first glance, this may seem like a clean and convenient integrated solution. However, in practice, it comes with several significant drawbacks.
The noise level of the computed 6-axis force vector is inconsistent, as it depends heavily on the robot’s configuration. For example, in singularities, such as when the arm is fully extended, certain components of the end-effector force are absorbed by the robot’s structure and go undetected by the joint torque sensors.
Moreover, internal torque sensors can be costly to maintain, as servicing a damaged sensor often requires extensive time and effort.
Torque-sensing by motor current measuring
Nowadays, it is very common to use current sensors on the robot joint motor in order to estimate the torque at the output shaft of the robot joint and use it as if it were an installed torque sensor.
This is a very elegant method to measure torque since it requires minimum space on the motor controller PCB and it comes at a very low cost and maintenance. The robot joint requires calibration in order to create a lookup table or a transfer function to estimate the actual torque.
Current electrical motor technology has limitations in the torque it can output. For this purpose, mechanical gearboxes are used.
Most of them introduce nonlinearities (backlash), friction, and performance drop over the cycles, which results in increased uncertainty of torque measurements.
Precision force torque sensors in action
Robotics companies often focus on standard applications such as stacking pallets or welding, where built-in/integrated force-torque sensors are generally good enough.
However, there is a growing array of applications that require a higher level of force torque sensing quality, for example, precision assembly applications or grinding and polishing tasks.
It is a fact that surface finishing applications, such as material removal, polishing, deburring, or deflashing, are some of the dirtiest, most unpleasant, and most difficult tasks in the field of manufacturing.
The use of force-torque sensors and the implementation of direct force control enables the effective automation of challenging processes.
Rapid and accurate feedback from high-precision external sensors provides the required flexibility and adaptability for even the most complex shapes and enables a consistently high surface quality.
An additional benefit is that the use of external force torque sensors increases manufacturing flexibility, making it easier to adapt an existing system to create new applications by selecting a different sensor.
This means customers can cost-effectively work at a smaller production scale, flexibly applying multiple variations of a similar part or even smaller batches of a specific part.
It also makes it possible to modify a robotic system for a given time, for example, the installation of a different sensor for a short-run project running for just a few weeks.
Software, support, and toolkit
Botasys force torque sensors are provided as a complete kit, including integrated electronics, cabling, a power supply, adapters, fasteners, etc.
The kit includes a USB stick containing all the required drivers and code for common platforms such as Python, TwinCAT, URcap, Stäubli Robot Studio, Matlab, LabVIEW, ROS, or Windows.
The package comes with sample code to save development time in setting up the most common applications. This code can be used to create the building blocks for various tasks, making it easier to write the complete program required by the customer.
At first glance, it may seem that getting a system up and running should be easier with an integrated sensor, however, this has already been fully addressed by sensor vendors and robotics companies working together to simplify integration.
For example, Bota’s Universal Robot FT Sensor Kit, a highly sensitive six-axis force torque sensor, is certified by Universal Robots (UR+) for use with its UR20 collaborative robot.
With this certification, Bota Systems has joined the ranks of the UR+ ecosystem, a growing group of partners approved by UR for use with its robots. This gives customers the confidence to select from best-in-class solutions, such as Bota’s sensors, whilst saving development time and reducing risk.
Conclusion
Robots need to be both smarter and more flexible, however without compromising on safety, which remains the number one priority. Force control addresses these key challenges, providing real-time actionable data from highly accurate and reliable force-torque sensors.
This article has shown that not all force torque sensors are created to fit in any application. External sensors clearly have numerous advantages over more standard built-in options, typically being far more precise and flexible.
Bota Systems force torque sensors are specifically designed for robotic applications – they are accurate, robust, compatible, and straightforward to integrate and promise to move demanding robotic applications to the next level.