Leveraging force sensing to empower the AI community with the next generation of robotic data collection methods.
Bota Systems enables Physical AI by combining high-fidelity force sensing, tactile feedback, vision, and robot state into a unified data collection platform.
The system is designed to help researchers and automation teams generate reliable, contact-rich datasets for modern robotic learning.
Bota Systems enables Physical AI through three complementary interaction methods.
Together, they create a unified platform for collecting high-quality, contact-rich data and turning your robot into a true Physical AI data engine.
Haptic Teleoperation
Operate robots remotely with real-time force feedback. Haptic Teleoperation allows users to feel interaction forces at the end effector, enabling precise control, safer remote operation, and high-fidelity demonstration data for AI training.
Teach robots by physically guiding them through tasks. Kinesthetic Teaching provides an intuitive way to program robots while capturing synchronized motion, force, and sensory data for learning-based automation.
Bota Systems’ haptic teleoperation platform connects a leader robot operated by a human with a follower robot performing the task.
Motion commands and force feedback are exchanged in real time, enabling intuitive robot control while capturing high-fidelity interaction data for Physical AI training.
A dedicated controller synchronizes both robots and streams robot state and force measurements to the host system through a ROS2 interface, where experiments can be monitored and datasets recorded.
Multimodal Data Capture
Joint states
Cartesian pose
Force & torque at TCP
Tactile grasp forces
Demonstration trajectories
System Architecture Overview
Multimodal Data Capture
Unify robot dynamics, vision, and semantic context into one synchronized data pipeline for Physical AI.
All critical modalities captured — synchronized and aligned.
Joint position, velocity & torque
Cartesian pose & twist
High-precision wrench at TCP
Tactile sensing at the fingertips
Text and 3D camera data
Designed to produce clean, learning-ready datasets for contact-rich robotic tasks.
Extreme Sensitivity with the Sense of Touch
Measure subtle interactions with high resolution:
Wrench at TCP precision < 0.1 N
Fingertip tactile sensitivity < 0.01 N
Detect micro-forces, early contact events, and slip — beyond what vision alone can provide.
Effortless Data Collection
Intuitive User Interface
Collect rich multimodal data through a streamlined Click & Collect workflow.
Kinesthetic Teaching
Teleoperation
Episode recording
Live measurements
Integrated SQL database
Intuitive workflow
Built for fast experimentation and efficient dataset generation.
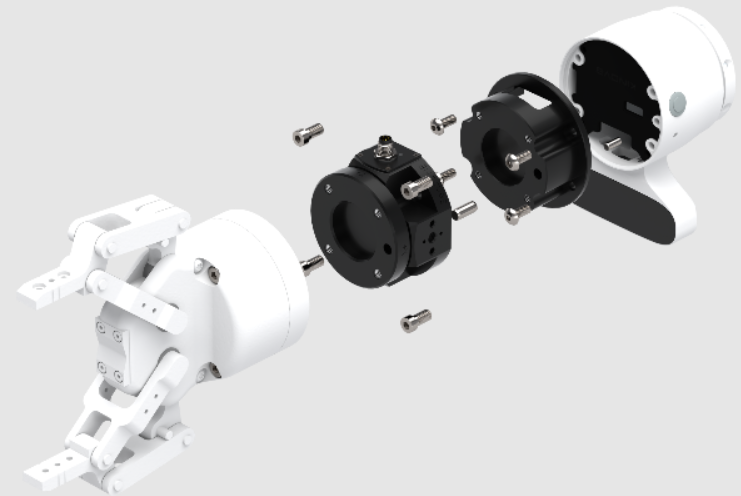
Supported Robot Platforms
The Bota Systems data collection platform integrates seamlessly with a wide range of robot brands and accessories, combining hardware compatibility with deep, low-level software integration.